 Порта3 – градежништво, архитектура и екологија Порта3 – градежништво, архитектура и екологија
Порта3 – градежништво, архитектура и екологија Порта3 – градежништво, архитектура и екологија
При дејство на хоризонтални сеизмички сили геометријата на лушпите има клучна улога во нивното однесување, пред сè поради нивната лесна маса и големата геометриска крутост. И покрај тоа сеизмичкото оптоварување ретко се зема предвид при првичното одредување на формата на лушпите, иакo би можело значајно да ја подобри материјалната ефикасност и сеизмичките перформанси. Денес се развиени методологии кои генерираат форми за лушпи проектирани да ја носат сопствената тежина и сеизмичкото оптоварување преку 3Д модели на висечки мрежи добиени со метод на динамичка релаксација. Со примена на ваквиот пристап се дефинира геометријата на еднослојна лушпа со променлива дебелина или геометријата на двослојни меѓусебно поврзани потенки и полесни лушпи.
Во ова истражување е презентиран методот применет во софтверскиот пакет Rhinoceros 3D. Преку имплементација во виртуелната програмска околина Grasshopper и програмскиот јазик Python изграден е алгоритам кој за зададена форма на основа, дефинирани гранични услови и интензитет на сеизмичка сила генерира двослојна лушпа. Динамичката релаксација е изведена со примена на Kangaroo, кој е интегриранa библиотека на функции во Grasshopper, по што предложениот алгоритам од добиените лушпи од различни товарни случаи ја дефинира енвелопата на двојната лушпа.
ДОБИВАЊЕ ПОЕДИНЕЧНИ ЛУШПИ СО МЕТОД НА ДИНАМИЧНА РЕЛАКСАЦИЈА
Со цел добивање еневелопа на двојна лушпа, најпрво се дефинираат поединечните лушпи од различни товарни случаи. Во ова истражување земени се 5 различни товарни случаи: дејство само од сопствената тежина и 4 комбинации на дејство од сопствена тежина и хоризонтални сеизмички сили во двата ортогонални правци, во позитивната и негативната насока со интензитет на забрзување од 0,45 g.
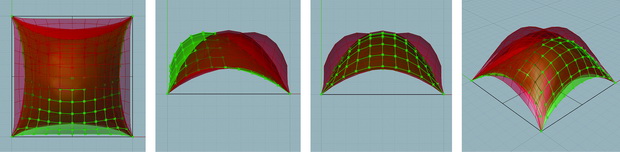
Сл.1 Поединечни лушпи за квадратна основа потпрена на четирите агли: а) дејство од вертикална сила g и хоризонтална сеизмичка сила 0,45g во негативниот у-правец-зелена мрежа; б) дејство од различни товарни комбинации-црвена мрежа
Алгоритамот за изведување на операцијата кој го користи Kangaroo е форма на динамична релаксација. Со комбинирање на сите сили кои дејствуваат на секоја точка се определува рамнотежата преку постојаното поместување на сите точки сè додека силите не се избалансираат и движењето не престане, односно сè додека структурата не застане во статичка рамнотежа. Ова се случува на динамичен начин, така што движењето ќе осцилира околу рамнотежата, а амортизацијата се користи за да се отстрани енергијата и да се обезбеди конвергенција. Во типичните инженерски апликации на динамичка релаксација, саканиот излез е конфигурација на статичка рамнотежа за зададени гранични услови.
Во разгледуваниот случај земена е квадратна основа која се потпира на четирите агли, која во Rhinoceros e искористена како основа за генерирање мрежа поделена на 10 х 10 полиња во Grasshopper. Дефинираната мрежа заедно со товарите се задаваат како цели на пресметувачот кој по пат на динамичка релаксација ги моделира лушпите.
Вака добиените лушпи претставуваат влезни информации за алгоритмот кој како излезна информација ја генерира енвелопата на двојната лушпа. Имајќи предвид дека специфичните функции потребни за генерирање на енвелопата не се достапни во библиотеките на Grasshopper, програмиран е класичен алгоритам во програмскиот јазик Iron Python (верзија 2.7.3).
ДИСКОНТИНУИТЕТ ВО ГЕОМЕТРИЈА
Kangaroo како излезна информација генерира две листи: листа со точки-темиња и листа со линии кои ги поврзуваат точките со метод на триангулација. Бројот на темиња и линии е идентичен со бројот на темиња и линии кои ја формираа првичната мрежа на основата, што значи дека за добиените лушпи се добива листа на референтни точки-темиња кои треба да бидат анализирани за да се дефинира енвелопата.
Првичниот пристап кон анализата беше групирање на точките во квадранти во однос на нивните х и у-координати, односно создавање листа од групи на точки каде што доколку х-координатата на одредена точка припаѓа во одредени граници и у-координатата припаѓа во одредени граници, тогаш точката припаѓа на одредена група на листата. Во визуелна смисла ова претставува ортогонална мрежа од квадратни полиња проектирана во хоризонталната ХY-рамнина и сите точки, чии проекции во хоризонталната рамнина припаѓаат во границите на едно поле, формираат група. Добиената листа од групи беше анализирана така што беа разгледани сите точки во рамки на групата и алгоритмот ги издвојува точката која има најголема Z-координата и точката која има најмала Z- координата. Вака дефинираните точки алгоритамот ги сортира во две листи, листа на точки со најголема Z-координата, која се користи за генерирање на горниот слој од лушпата и листа на точки со најмала Z-координата, која се користи за генерирање на долниот слој на лушпата.
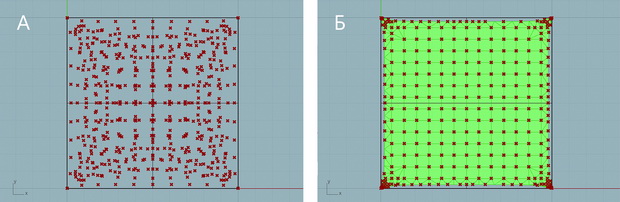
Поставениот алгоритам успешно врши селекција на точките, меѓутоа е зависен од првичната дефиниција на точките од Kangaroo, односно од првичната дефиниција на мрежата, при што како влезна информација потребно е да бидат дефинирани голем број на референтни точки. Во спротивно доколку бројот на дефинирани точки не е доволен при нивното групирање се создаваат групи во чии рамки не постојат референтни точки од секоја лушпа, што резултира со дисконтинуитет на геометријата. При разгледувањето на одредени групи можно е да не може да се дефинира референтна точка од лушпата која во тој сегмент има најголема Z-координата, што доведува алгоритмот да избере точка која не е вистинскиот максимум за тој сегмент, резултирајќи со грешка во дефиницијата на енвелопата (сл. 2).
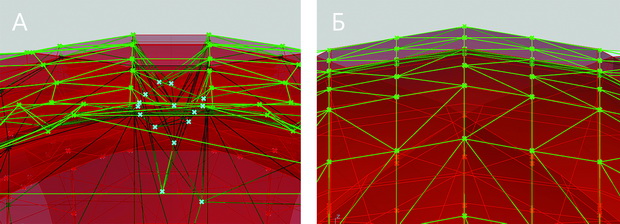
Сл.2 Грешка во дефиниција на мрежата: A) дисконтинуитетот во геометријата на лушпата; Б) резултатот по корекцијата на влезните податоци
КОРЕКЦИЈА НА ВЛЕЗНИ ПОДАТОЦИ
Со цел да се надмине проблемот на дисконтинуитетот на геометријата од првичниот алгоритам, разгледани се влезните информации-точки со кои работи, при што потребно е да се потврди дека за секој разгледуван сегмент се дефинира репрезентативен примерок на референтни точки.
При разгледувањето на овој проблем важно е да се нагласи дека пресметувачот на Kangaroo како резултат, преку листата од линии, ги генерира сите потребни информации за повторно да може да се дефинира лушпата како површина (мрежа), а не само како листа на референтни точки. Grasshopper дефинира мрежи користејќи структура на податоци: теме, точка на мрежата – лице, многуаголник. Оваа структура е едноставно листа на точки кои се групирани во многуаголници (триаголници или четириаголници) кои формираат една континуирана површина. Првично работата на алгоритамот е само со темињата на мрежата, користејќи ги директно како референтни точки. Кога листата на линии ќе биде применета за повторно формирање на мрежата се добива површина (лице), а не само листа од темиња, што нуди можност да се дефинираат неограничен број на точки кои припаѓаат на површината.
За да се определат референтните точки од лушпите се користи вградена функција на Grasshopper: проекција на точка на површина, која овозможува која било дадена точка да се проектира врз зададена геометрија во насока на зададен вектор. Во конкретниот случај тоа значи дека доколку во хоризонталната рамнина се зададат серија од точки, истите можат да се проектираат на лушпите во насока на Z-оската (сл. 3).
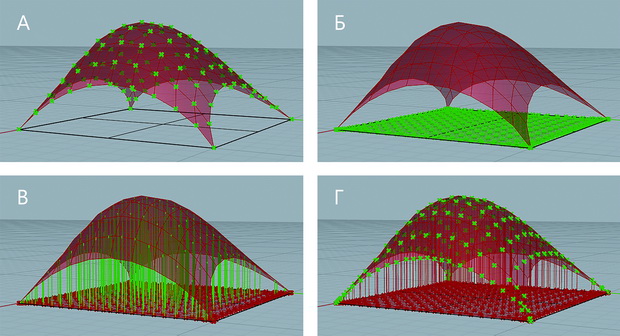
Сл.3 Дефинирање на нови влезни точки преку проекција на точки од XY рамината врз лушпите во правец на Z – оската: А) темиња на мрежата од Kangaroo; Б) мрежа од унијата на проекции на лушпите; В) проекции од темињата на новата мрежа врз лушпите; Г) нови референтни точки
Овој пристап нуди две предности. Имено, проектираните точките се фиксни во поглед на нивните х и у-координати за секоја од поединечните лушпи, со што се добиваат референтни точки кои имаат идентични х и у-координати, што овозможува надминување на проблемот со создавањето празнини, добивајќи референтни точки од сите лушпи кои постојат за дадените координати. Дополнително проектирањето точка на дадена површина е процес со кој софтверот работи многу побрзо и полесно, споредено со пресметувачот на Kangaroo, што води кон побрз резултат и овозможува добивање на многу поголема листа на референтни точки, односно многу попрецизна дефиниција на енвелопата.
При дефинирањето на серијата точки важно е да се дефинира границата во која точките ќе бидат зададени, со цел да се добијат референтни точки од истата, за со сигурност енвелопата во целост да ги опфати сите лушпи. Како граница на референтните точки за добивање на горниот слој од лушпата го дефинираме делот од XY-рамнината во кој постои барем една од лушпите, додека како граница за долниот слој на лушпата го дефинираме делот од рамнината во која постојат сите разгледувани лушпи. Ова е неопходно затоа што во одредени сегменти постои само една од лушпите и во таков случај таа претставува дел од горниот слој на лушпата, а бидејќи нема присуство на други референтни точки истата би била одбрана и како највисока и како најниска точка. Границите се формираат земајќи ги проекциите на секоја од лушпите во XY-рамнината и дефинирајќи ја нивната унија и нивниот пресек. Точките се зададени како темиња на мрежа која е дефинирана од унија на криви на сите проекции од лушпите во хоризонталната рамнина. Оваа листа на точки е дополнета со точките од кривата која ја дефинира разликата од сите проекции во хоризонталната рамнина.
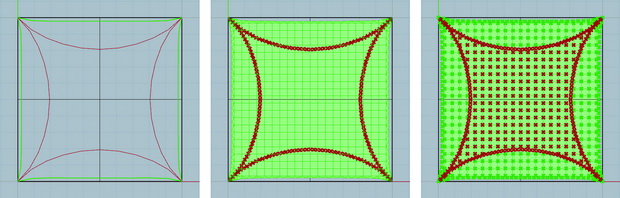
Сл. 4 Дефинирање на нови референтни точки: а) унијата на проекции-зелена површина; б) пресек на проекциите-црвена линија
Како излезни податоци се добиваат две листи со точки, кои го дефинираат горниот и долниот слој на лушпата, односно горната и долната граница на енвелопата, со што се надминуваат проблемите со дисконтинуитетот на геометријата и се добиваат прецизни и брзи резултати.
РЕЗУЛТАТИ
Најголема придобивка од имплементацијата на динамичката релаксација, како метод за создавање на формата, во раните фази на проектирањето значајно може да го подобри финалниот резултат на формата во однос на носивите карактеристики. Ваквите алгоритми се наменети пред сè за архитекти проектанти и го намалуваат потребното време за изработка на проектот, овозможувајќи ефикасен процес преку кој брзо и едноставно се разгледуваат најразлични можни решенија на формата, кои секогаш ја имаат земено предвид зададената форма на основата, дефинираните гранични услови и интензитетот на сеизмичка сила. Додадена вредност на вака добиените форми, за разлика од произволно проектираните, претставува многу подобра основа за понатамошна разработка и конструктивна анализа, што значи помалку измени во процесот на проектирање и подобра контрола од самиот почеток.
Сл. 5 Конечни резултати од селектирањето на точките: А) точки кои дефинираат горна граница; Б) точки кои дефинираат долна граница
Дефинирањето на енвелопа е функција која е вградена во различни софтверски пакети, но за поставените цели неопходна е имплементација на методот во соодветен софтвер. Нејзиното внесување во Rhinoceros3D и Grasshopper ја прави достапна како алатка за проектирање на формата уште при дефинирањето на самиот концепт за проектот, а применувајќи го конкретниот софтвер се овозможуваат анализи од аспект на асеизмичко проектирање. Дополнително работењето во параметарски софтвер дозволува генерираните форми веднаш да бидат разгледани и од останати аспекти во однос на програмските барања, околината, осветлувањето, со што едноставно може да се усвои оптималната форма.
асс. м-р Теодора МИХАЈЛОВСКА, Архитектонски факултет, Универзитет „Св. Кирил и Методиј“
проф. д-р Владимир ВИТАНОВ, Градежен факултет, Универзитет „Св. Кирил и Методиј“
проф. д-р Ана ТРОМБЕВА-ГАВРИЛОСКА, Архитектонски факултет, Универзитет „Св. Кирил и Методиј“
