 Порта3 – градежништво, архитектура и екологија Порта3 – градежништво, архитектура и екологија
Порта3 – градежништво, архитектура и екологија Порта3 – градежништво, архитектура и екологија
И покрај тоа што автономните возила во истражувачките лаборатории поставуваат рекорди во возење, целосно автономните возила, кои легално ќе возат на јавните патишта, се сè уште сон.
Добра вест е тоа што иновираните и напредни технологии, како системите за автономно паркирање, автономните системи за кочење, системите за следење на лента и други, стануваат сè поприсутни во комерцијалните возила. Ако сите овие се обединат, може да се добие слика за тоа како ќе се изврши преминот од возење, преку асистирано возење до потполно автономни возила.
Подолу ќе бидат разгледани неколку автономни решенија (технологии) кои се користат во модерните автомобили, како и краток осврт на предизвиците кои постојат до пуштање на целосно автономни возила на јавните патишта.
Автономно паркирање
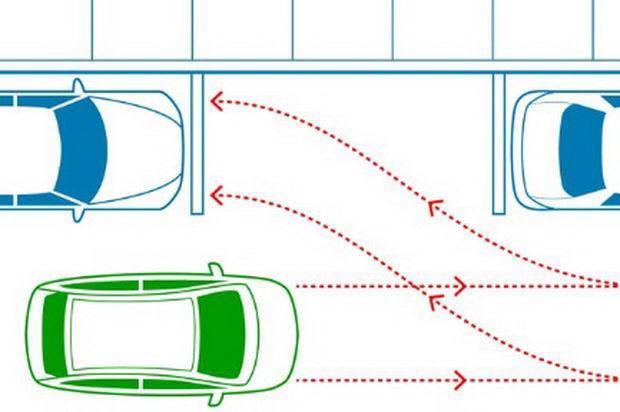
Помошта за паркирање е легална уште од 2003 година кога e пласиран модел со способност автомобилот да го преземе управувањето при паралелно паркирање. Возачот морал да го избере местото за паркирање на видеоекранот на управувачката табла, а потоа да управува со брзините, педалата за гас и кочниците, додека автомобилот го врши управувањето на воланот. Оттогаш, најголемиот дел од произведувачите на автомобили имаат воведено системи за асистирано (или целосно автономно) паркирање, и секоја година истите стануваат сè пософистицирани.
Најчесто, овие системи се базираат на широкоаголни оптички камери кои го идентификуваат просторот за паркирање и ултразвучните сензори за откривање на пречки во близината. Веќе во најновите верзии, овие системи се целосно автономни, т.е. асистентот за паркирање дава предлог на местото за паркирање, а возачот треба само да го одобри изборот и да ги тргне рацете од воланот и нозете од педалите.
Автономни системи за одржување брзина
Преголема (неприлагодена) брзина на автомобилот е најчестиот фактор за тешки сообраќајни несреќи. Ограничувањата на брзините (означени на патот) се наменети за одржување соодветно ниво на брзини во соодветни околини, што води до поефикасен и побезбеден проток на сообраќајот.
Системите за асистирано одржување на брзина најчесто содржат:
– Давање информација на возачот за моменталната брзина;
– Предупредување на возачот кога брзината на автомобилот е над поставениот праг;
– Активно спречување на автомобилот да ја надмине поставената брзина.
Најсофистицираните системи, кои ги содржат и трите компоненти, се наречени интелигентни системи за адаптивно одржување брзина (анг. Adaptive Cruise Control – ACC). Кај овие системи, поставувањето на брзината се извршува со едноставна потврда (од страна на возачот) на предлог-детектираната брзина, од страна на автомобилот. Автомобилот го детектира ограничувањето на брзината преку препознавање на знаците на патот (со алгоритми за обработка на слика) или преку постоечка дигитална мапа на патот.
ACC-системите користат и други сензори (првично ласери, а во поново време и радари) со цел да се прилагоди поставената брзина на евентуално поспорите автомобили кои се движат напред.
Автономни системи за кочење во итни случаи
Голем дел од несреќите се предизвикани од задоцнето кочење и/или кочење со недоволна сила.
Технологиите кои можат да му помогнат на возачот да избегне вакви несреќи или барем да ја намали нивната тежина се наречени автономни системи за кочење во итни случаи (анг. Аutonomous Еmergency Бraking – AEB systems).
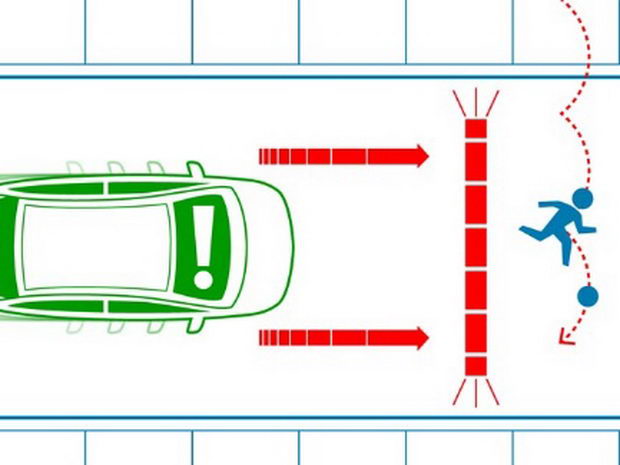
Бидејќи различни сензори за детекција на објект може да не работат соодветно при нестандардни услови, во денешницата најсовремените технологии користат повеќе од еден тип на сензор за да се направи вкрстена проверка на препреки. Повеќето AEB-системи користат радар, (стерео) камера и/или технологии базирани на лидар (систем налик на радар кој користи светлина наместо радиобранови), за да ги идентификуваат потенцијалните партнери за судир. Овие информации се комбинираат со информациите за сопствената брзина на возење и траекторијата на движење, по што се утврдува дали се развива критична ситуација или не.
Ако се утврдат услови за потенцијален судир, AEB-системите генерално (иако не исклучиво) прво се обидуваат да го избегнат судирот со тоа што го предупредуваат возачот дека е потребно дејство. Ако возачот не преземе никакво дејство и сè уште се очекува судир, системот ќе ги примени сопирачките.
Она што сè уште интензивно се истражува е каква е реакцијата на човекот кога ќе му се одземе контролата. Бидејќи и најпрецизните возачи може да бидат нервозни при примена на овие технологии, со цел да се надминат недостатоците кои потекнуваат од психологијата на човекот, оваа технологија се развива сè поинтензивно, а Европската програма за проценка на нови автомобили (European New Car Assessment Programme – Euro NCAP), побарува AEB-системите да добијат највисок безбедносен рејтинг.
Системи за одржување на лента
Системите за одржување на лента можат да му помогнат или го предупредат возачот кога ненамерно ја напушта лентата или кога ја менува лентата без индикација. Овие системи или вршат предупредување за напуштање на линијата, или пак вршат асистирано одржување на лентата.
Системи за предупредување за напуштање на линијата
Развиените технологии за предупредување на возачот за напуштање на линијата користат различни предупредувања: некои даваат звучен сигнал, додека други користат вибрирачки волан за да го симулираат чувството кога возилото оди по рапава линија. Повеќето системи од овој тип работат само при високи брзини, со цел сигналот да не го иритира возачот непотребно.
Вообичаено постои камера која се наоѓа зад ретровизорот, во горниот дел на шофершајбната. Сликите од оваа камера континуирано се анализираат од страна на компјутер, со цел да се идентификуваат обележувањата на лентата. Во исто време, се следи управувањето на возачот, како и брзината и траекторијата на возилото. Овие параметри се комбинираат за да се утврди дали автомобилот ненамерно заминува од лентата.
Системите за предупредување за напуштање на линијата се потпираат на означените линии на патот. Ако линиите не се доволно видливи (јак дожд, магла, кал, снег) ефикасноста на овие системи значително се намалува. Во тие случаи, му се дава индикација на возачот дека системот не е во можност да помогне.
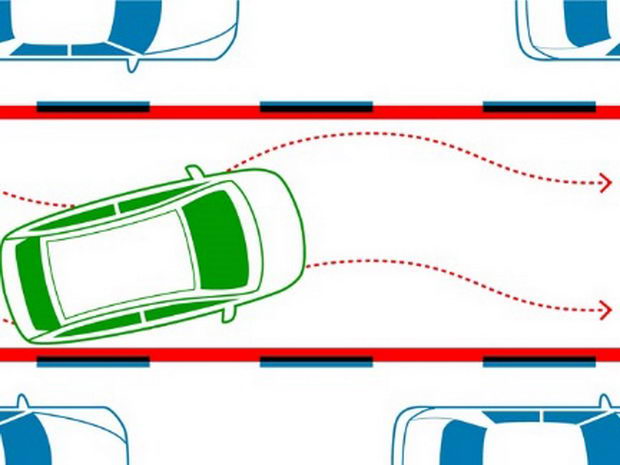
Системи за асистирано одржување на лента
Овие системи, за разлика од системите за предупредување, кои зависат од возачот, проактивно го насочуваат автомобилот назад во лентата. Кога автомобилот е блиску до означувањата, системот нежно го насочува автомобилот подалеку од линијата, додека не се најде безбедно на лентата. Сепак, возачите не треба да се потпрат целосно на овие системи бидејќи некои од нив се деактивираат ако почувствуваат дека возачот повеќе не го управува возилото, што укажува на фактот дека истите се далеку од совршени.
Како автономните возила ќе станат дел од јавните патишта

Погоре беа изложени дел од технологиите за алармирање и помош на возачот кои постојат во комерцијалните автомобили. Дел од тие системи, како што е на пример автономното кочење, се направени да реагираат самостојно, по што, по избегнување на опасноста, му се враќа управувањето на возачот. Сепак, за да се постигне потполна автономност, возилото не би требало да бара помош од човекот-возач. Таков тип на автомобил сè уште не е во широко комерцијално производство, но во рамките на експерименталните автономни возила, постигнат е значителен напредок.
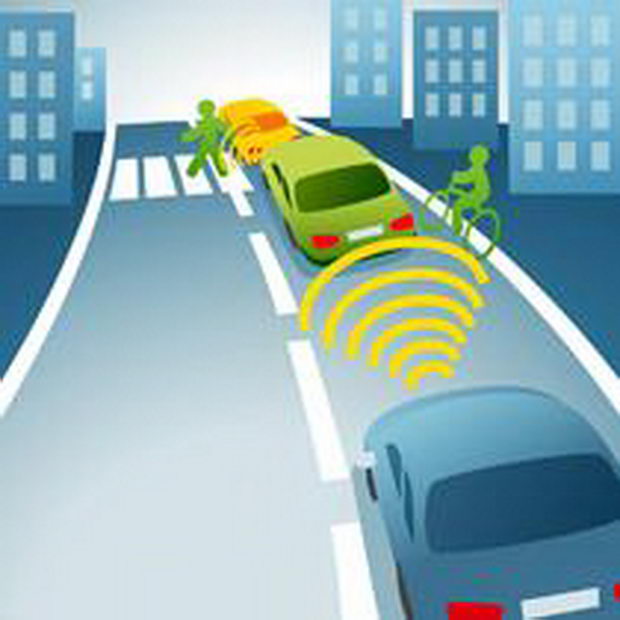
Компаниите секоја година пласираат сè подобрени и иновирани автономни технологии, што води до очекувањето дека автономните возила имаат потенцијал за радикално подобрување на животот на човекот. Но со цел да се искористат предностите од овие нови технологии, прво треба да се изврши прилагодување на светот на нивните потреби. Ова значи глобална припрема на градовите со воведување на најнови генерации на мобилни мрежи и останата инфраструктура, со цел автомобилите непречено да разменуваат податоци едни со други, како и задоволување на низа нетехнички ограничувања, меѓу кои и спремноста на законските рамки за новите членови во сообраќајот.
Автономните возила моментално работат преку собирање податоци од различни сензори, и нивна понатамошна обработка со различни алгоритми. Овие алгоритми му кажуваат на возилото каде да вози, со која брзина, и кога да застане. Но, податоците кои ги собираат овие сензори во основа се ограничени. Возилото не ја знае положбата на друго возило надвор од неговото видно поле, ниту ја знае состојбата на сообраќајот на 10 километри од него. За да се надмине ова, автономните возила на иднината ќе имаат пристап до податоци собрани од илјадници возила околу, како и од уреди за поддршка на возењето поставени на самите патишта (од нив ќе се добиваат дополнителни информации за состојбата на подлогата, временските услови, сообраќајот и слично).
Од друга страна, дали и кога на возачот ќе му биде дозволено да го препушти возењето целосно автономно сигурно нема да зависи само од совршеноста на возилото, туку и од соодветните законски регулативи во различни земји. Дел од САД веќе имаат донесено прелиминарни законски легислативи за справување со предизвиците кои произлегуваат од пуштање на експериментални автономни возила по улиците. Дали пуштањето на експериментални автономни возила по улиците ќе значи нивно тестирање од одредено регулаторно тело („возачка дозвола за секое автономно возило“) е секако отворено прашање чиј одговор тек допрва следува.
Се очекува автономните возила да бидат комерцијално застапени до 2025 година, а постигнување на целосна автоматизација на системот за транспорт во низа напредни земји се очекува до 2070 година. Овие меѓуповрзани возила ќе се движат многу блиску едни до други и со многу поголеми брзини. На овој начин ќе се креира сосема различна мрежа за транспорт, во однос на сегашната, која ќе биде побезбедна, побрза, поефикасна, поеколошка и попродуктивна. Како што рапидно се приближуваме кон точката во која меѓуповрзаните возила се целосно спремни за улиците, треба да ги направиме нашите улици спремни за тие возила.
Автор: Весна ОЈЛЕСКА-ЛАТКОСКА, доц. д-р

